
در این پست از سایت اِمیک, یک پست آموزشی با عنوان آشنایی با استپر موتور و ساختار و نحوه عملکرد آن قرار داده شده است. در ادامه ابتدا مقداری با استپر موتور آشنا می شویم و در ادامه به ساختار , نحوه کار , انواع استپر موتور و دیگر موارد لازم می پردازیم.
استپر موتور چیست؟
استپر موتور (Stepper Motor) نوعی موتور الکتریکی است که حرکت آن به صورت گامبهگام انجام میشود. برخلاف موتورهای DC معمولی که با اعمال ولتاژ به صورت پیوسته میچرخند، استپر موتور با دریافت پالسهای الکتریکی حرکت میکند و هر پالس باعث چرخش موتور به اندازه یک گام مشخص میشود.
به بیان ساده، در استپر موتور هر پالس الکتریکی معادل یک حرکت زاویهای کوچک است. به همین دلیل میتوان موقعیت موتور را با دقت بالایی کنترل کرد. این ویژگی باعث شده استپر موتورها در سیستمهایی که نیاز به کنترل دقیق موقعیت و حرکت دارند بسیار پرکاربرد باشند.
برای مثال اگر زاویه هر گام موتور 1.8 درجه باشد، موتور برای یک دور کامل به 200 گام نیاز دارد. بنابراین با شمارش تعداد پالسها میتوان زاویه چرخش موتور را بهطور دقیق تعیین کرد.

به دلیل همین قابلیت کنترل دقیق، استپر موتورها در بسیاری از دستگاههای صنعتی و الکترونیکی مورد استفاده قرار میگیرند.
ساختار استپر موتور
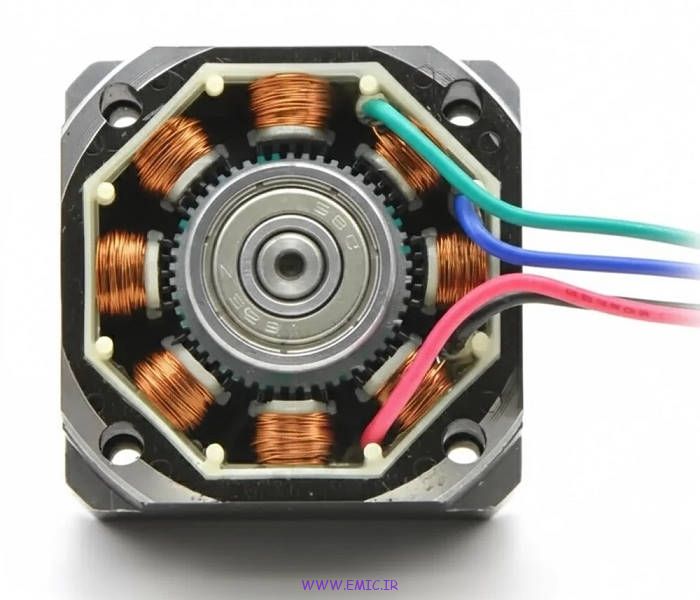
برای درک بهتر نحوه عملکرد استپر موتور، ابتدا باید با ساختار داخلی آن آشنا شویم. به طور کلی یک استپر موتور از چند بخش اصلی تشکیل شده است که با همکاری یکدیگر باعث ایجاد حرکت گامبهگام در موتور میشوند.
استاتور (Stator)
استاتور بخش ثابت موتور است که در اطراف روتور قرار دارد. روی استاتور تعدادی سیمپیچ الکتریکی قرار گرفته است. با عبور جریان از این سیمپیچها، میدان مغناطیسی ایجاد میشود که باعث حرکت روتور میشود.
روتور (Rotor)
روتور بخش متحرک موتور است که در مرکز استاتور قرار دارد و به شفت متصل است. در بسیاری از استپر موتورها روتور از آهنربای دائمی یا ساختار دندانهدار مغناطیسی ساخته میشود تا بتواند به میدان مغناطیسی ایجاد شده در استاتور واکنش نشان دهد.
سیمپیچها (Coils)
سیمپیچها روی استاتور قرار دارند و با عبور جریان الکتریکی از آنها میدان مغناطیسی تولید میشود. با فعال شدن سیمپیچها به ترتیب مشخص، میدان مغناطیسی در اطراف روتور تغییر میکند و روتور به صورت گامبهگام میچرخد.
شفت (Shaft)
شفت محور خروجی موتور است که حرکت چرخشی روتور را به بیرون منتقل میکند. در کاربردهای مختلف، قطعات مکانیکی مانند چرخدندهها یا پولیها به شفت متصل میشوند تا حرکت موتور به سیستم منتقل شود.
در مجموع، تعامل بین روتور و میدان مغناطیسی ایجاد شده در سیمپیچهای استاتور باعث میشود استپر موتور بتواند حرکتهای دقیق و مرحلهای ایجاد کند.
نحوه کار استپر موتور
اساس کار استپر موتور بر پایه ایجاد میدانهای مغناطیسی متوالی در استاتور است. زمانی که جریان الکتریکی از سیمپیچهای استاتور عبور میکند، در اطراف آنها میدان مغناطیسی ایجاد میشود. روتور که خاصیت مغناطیسی دارد، تمایل پیدا میکند در راستای این میدان قرار بگیرد.
با تغییر ترتیب فعال شدن سیمپیچها، موقعیت میدان مغناطیسی در استاتور جابهجا میشود. در نتیجه روتور نیز برای همراستا شدن با میدان جدید کمی میچرخد. این حرکتهای کوچک و متوالی باعث میشوند موتور به صورت گامبهگام (Step by Step) بچرخد. به هر یک از این حرکتهای کوچک گام (Step) گفته میشود.
در عمل، سیمپیچها با یک توالی مشخص فعال میشوند تا میدان مغناطیسی در اطراف روتور به صورت چرخشی تغییر کند. با تکرار این توالی، موتور به چرخش ادامه میدهد.
زاویه گام (Step Angle)
یکی از مهمترین مشخصههای استپر موتور، زاویه گام یا Step Angle است. زاویه گام مقدار زاویهای است که موتور با دریافت هر پالس الکتریکی میچرخد. به بیان دیگر، هر بار که درایور یک پالس کنترلی به استپر موتور ارسال میکند، روتور به اندازه این زاویه میچرخد.
زاویه گام معمولاً با درجه (Degree) بیان میشود. برای مثال در بسیاری از استپر موتورهای رایج، زاویه گام برابر با 1.8 درجه است. این یعنی موتور با دریافت هر پالس، 1.8 درجه میچرخد.
با استفاده از زاویه گام میتوان تعداد گامهای لازم برای یک دور کامل موتور را محاسبه کرد. برای این کار کافی است زاویه یک دور کامل یعنی 360 درجه را بر زاویه گام موتور تقسیم کنیم.
برای مثال اگر زاویه گام موتور 1.8 درجه باشد:
200=1.8÷360
بنابراین این موتور برای یک دور کامل به 200 گام نیاز دارد. به همین دلیل معمولاً گفته میشود این نوع استپر موتور دارای 200 Step per Revolution است.
برخی استپر موتورها دارای زاویه گامهای متفاوتی هستند. برای مثال:
- 0.9 درجه (400 گام در هر دور)
- 1.8 درجه (200 گام در هر دور)
- 7.5 درجه (48 گام در هر دور)
- 15 درجه (24 گام در هر دور)
هرچه زاویه گام کوچکتر باشد، تعداد گامهای لازم برای یک دور بیشتر میشود و در نتیجه دقت کنترل موقعیت موتور افزایش مییابد.
البته باید توجه داشت که زاویه گام، مقدار گام در حالت Full Step است. در صورتی که از روشهایی مانند Half Step یا Microstepping استفاده شود، هر گام به بخشهای کوچکتری تقسیم میشود و رزولوشن حرکت موتور افزایش پیدا میکند. این روشها در بخش بعدی مقاله بررسی میشوند.
روشهای حرکت در استپر موتور
استپر موتور میتواند با روشهای مختلفی کنترل شود. این روشها تعیین میکنند که سیمپیچهای موتور چگونه فعال شوند و هر گام موتور چه مقدار زاویه ایجاد کند. انتخاب روش حرکت تأثیر مستقیمی بر دقت، نرمی حرکت و گشتاور موتور دارد.
سه روش رایج برای کنترل حرکت استپر موتور عبارتاند از:
- Full Step
- Half Step
- Microstepping
در ادامه هر یک از این روشها را بررسی میکنیم.
مثال از توالی تحریک سیمپیچها
برای درک بهتر، یک استپر موتور دو فاز رایج (مانند بسیاری از موتورهای سری NEMA) را در نظر بگیرید. در این موتورها دو سیمپیچ اصلی با نام فاز A و فاز B وجود دارد و درایور با تغییر جهت جریان در این فازها، میدان مغناطیسی را جابهجا میکند.
Full Step (گام کامل)
در روش Full Step معمولاً دو فاز به صورت همزمان فعال میشوند تا گشتاور بیشتری تولید شود.
|
1 2 3 4 5 6 |
Step Phase A Phase B 1 + + 2 - + 3 - - 4 + - |
نکته : در این جدول «+» و «−» نشاندهنده جهت جریان در سیمپیچ هستند.
در این حالت با طی شدن چهار مرحله، یک چرخه کامل میدان مغناطیسی ایجاد میشود و موتور گامهای استاندارد خود را طی میکند. برای مثال در یک موتور با زاویه گام 1.8 درجه، هر دور کامل شامل 200 گام خواهد بود. 4 گام گفته شده در جدول بالا باعث چرخش 4 تا 1.8 درجه یعنی 7.2 درجه می شود و این مقادیر باید تکرار شود تا به 200 گام و 360 درجه چرخش برسیم.
Half Step (نیم گام)
در روش Half Step یک بار یک فاز و یک بار دو فاز فعال میشوند. این کار باعث میشود تعداد موقعیتهای مغناطیسی دو برابر شود و حرکت موتور نرمتر گردد.
|
1 2 3 4 5 6 7 8 9 10 |
Step Phase A Phase B 1 + 0 2 + + 3 0 + 4 - + 5 - 0 6 - - 7 0 - 8 + - |
نکته : در این جدول «+» و «−» نشاندهنده جهت جریان در سیمپیچ هستند و «0» به معنی غیرفعال بودن آن فاز است.
در این حالت تعداد گامها دو برابر میشود. بنابراین اگر موتور در حالت Full Step دارای 200 گام در هر دور باشد، در حالت Half Step این مقدار به 400 گام در هر دور میرسد. یعنی هر مرحله از جدول بالا باعث چرخش 1.8/2 یعنی 0.9 درجه می شود و 8 گام گفته شده در جدول بالا باعث چرخش 8 تا 0.9 درجه یعنی 7.2 درجه می شود و این مقادیر باید تکرار شود تا به 400 گام و 360 درجه چرخش برسیم.
Microstepping (میکرواستپینگ)
در روش Microstepping جریان در دو فاز به صورت تدریجی و معمولاً با الگوی سینوسی و کسینوسی تغییر میکند. در این روش به جای اینکه فازها فقط روشن یا خاموش باشند، مقدار جریان در آنها به طور پیوسته تغییر میکند.
به عنوان مثال یک توالی ساده در میکرواستپینگ میتواند به صورت زیر باشد:
|
1 2 3 4 5 6 7 |
Step Phase A Phase B 1 100% 0% 2 92% 38% 3 71% 71% 4 38% 92% 5 0% 100% |
با ادامه این تغییرات، میدان مغناطیسی به شکل بسیار نرم در اطراف استاتور حرکت میکند و روتور نیز با دقت بسیار بالاتر و لرزش کمتر میچرخد.
در بسیاری از درایورهای مدرن (مانند TB6600 یا A4988) میتوان موتور را در حالتهایی مانند 1/4 ، 1/8 ، 1/16 یا حتی 1/32 گام کنترل کرد که باعث افزایش رزولوشن حرکت میشود.
سرعت چرخش استپر موتور نیز به فرکانس پالسهای کنترلی بستگی دارد. هر پالس ورودی باعث اجرای یک گام (یا میکروگام) میشود؛ بنابراین با افزایش سرعت ارسال پالسها، سرعت چرخش موتور نیز بیشتر خواهد شد.
به طور خلاصه:
- در Full Step گشتاور بیشتر است، رزولوشن پایه موتور استفاده میشود (مثلاً 200 گام در دور).
- در Half Step رزولوشن دو برابر میشود (مثلاً 400 گام در دور) و حرکت نرمتر است، اما گشتاور کمی افت میکند.
- در Microstepping دقت و نرمی حرکت به شدت افزایش مییابد (مثلاً تا 3200 گام در دور در حالت 1/16)، اما گشتاور مؤثر در هر میکروگام کاهش مییابد و نیاز به درایور مناسب دارد.
انواع استپر موتور
استپر موتورها بر اساس ساختار داخلی و نحوه تولید گامها به سه دسته اصلی تقسیم میشوند:
- استپر موتور با آهنربای دائم (Permanent Magnet Stepper)
- استپر موتور متغیر رلوکتانس (Variable Reluctance Stepper)
- استپر موتور هیبریدی (Hybrid Stepper)
هر کدام از این موتورها ویژگیها و کاربردهای خاص خود را دارند که در ادامه توضیح داده میشود.
۱. استپر موتور با آهنربای دائم (Permanent Magnet)
در این نوع موتورها، روتور از آهنربای دائم ساخته شده است.
وقتی سیمپیچهای استاتور تحریک میشوند، قطبهای شمال و جنوب روتور توسط میدان مغناطیسی استاتور جذب یا دفع میشوند و روتور یک گام میچرخد.
ویژگیها:
- زاویه گام معمولاً بزرگتر (۵ تا ۱۵ درجه)
- ساخت ساده و قیمت پایین
- گشتاور راهاندازی نسبتاً بالا نسبت به اندازه
- مناسب برای سرعتهای پایین
کاربردهای معمول:
چاپگرها، ابزارهای دقیق ساده، و کاربردهای آموزشی.
۲. استپر موتور رلوکتانس متغیر (Variable Reluctance)
در این نوع، روتور از مادهی فرومغناطیسی فاقد آهنربای دائم (فولاد نرم) تشکیل شده است و دارای دندانههایی است که در اثر میدان مغناطیسی به سمت قطبهای فعال استاتور جذب میشوند.
نحوه عملکرد:
هر بار که جریان در یکی از سیمپیچهای استاتور برقرار میشود، دندانههای روتور در راستای آن فاز همراستا میشوند. با تحریک متوالی سیمپیچها، دندانهها یکییکی در راستای جدید قرار میگیرند و روتور میچرخد.
ویژگیها:
- زاویه گام نسبتاً زیاد (معمولاً 7.5° یا بیشتر)
- بدون آهنربای دائم در نتیجه گشتاور نگهدارنده (Holding Torque) پایینتر
- ساختار ساده و قیمت ارزان
کاربردها:
مکانیزمهای انتخاب چندحالته، شمارندهها و پروژههای کمهزینه.
۳. استپر موتور هیبریدی (Hybrid Stepper)
استپر موتورهای هیبریدی متداولترین نوع استپر موتور در کاربردهای صنعتی هستند. در طراحی این موتورها از ترکیب ویژگیهای دو نوع قبلی استفاده شده است. در این ساختار، روتور از یک آهنربای دائم تشکیل شده که سطح آن دارای دندانههایی است. وجود آهنربای دائم باعث ایجاد گشتاور نگهدارنده میشود و دندانههای روتور نیز باعث افزایش دقت در موقعیتیابی میشوند. به همین دلیل استپر موتورهای هیبریدی میتوانند گشتاور مناسب و دقت حرکتی بالایی را به طور همزمان فراهم کنند.
ویژگیها:
- زاویه گام کوچک (۱.۸° یا ۰.۹°) در نتیجه دقت بالا
- گشتاور نسبتاً زیاد در ابعاد کوچک
- عملکرد نرمتر و قابل کار در حالت Microstepping
- پشتیبانی توسط اکثر درایورهای رایج (A4988 ، TB6600 ، DRV8825 و غیره)
کاربردها:
پرینترهای سهبعدی، CNC، رباتیک، دستگاههای اندازهگیری و تجهیزات اتوماسیون صنعتی.
خلاصه مقایسه سه نوع استپر موتور
| ویژگی | Permanent Magnet | Variable Reluctance | Hybrid Stepper |
|---|---|---|---|
| نوع روتور | آهنربای دائم | فولاد نرم دندانهدار | دندانهدار + آهنربای دائم |
| زاویه گام معمولی | 7.5° تا 15° | 7.5° | 0.9° تا 1.8° |
| گشتاور نگهدارنده | متوسط | کم | زیاد |
| هزینه | پایین | پایین | متوسط تا بالا |
| دقت موقعیت | معمولی | پایین | بسیار بالا |
| کاربردها | پرینترها، ابزار ساده | شمارندهها، سوئیچها | CNC، پرینترهای سهبعدی، رباتیک |
در کاربردهای صنعتی و دقیق، تقریباً تمام استپر موتورهای مورد استفاده از نوع Hybrid هستند. بسیاری از مدلهای معروف سری NEMA مثل NEMA17 و NEMA23 نیز از نوع هیبریدی با زاویه گام 1.8° (200 گام در دور) هستند.
درایور استپر موتور (Stepper Motor Driver)
استپر موتور را نمیتوان مستقیماً به میکروکنترلر یا منبع تغذیه وصل کرد. برای راهاندازی آن از قطعهای به نام درایور استپر موتور استفاده میشود. درایور در واقع واسطی بین مدار کنترل (مانند آردوینو یا میکروکنترلر) و موتور است و وظیفه دارد جریان مورد نیاز سیمپیچهای موتور را به شکل صحیح و با ترتیب مناسب تأمین کند.
از آنجا که خروجی میکروکنترلرها جریان بسیار کمی دارند، درایور با استفاده از مدارهای قدرت (معمولاً پل H) امکان کنترل جریان زیاد در سیمپیچهای موتور را فراهم میکند. همچنین درایور با تغییر جهت جریان در فازهای موتور، باعث ایجاد میدان مغناطیسی چرخان و در نتیجه حرکت مرحلهای روتور میشود.
بسیاری از درایورهای مدرن از رابط کنترلی ساده STEP/DIR استفاده میکنند. در این روش، با هر پالس روی پایه STEP موتور یک گام حرکت میکند و پایه DIR جهت چرخش موتور را مشخص میکند. به این ترتیب میکروکنترلر میتواند تنها با ارسال پالس، موقعیت و سرعت موتور را کنترل کند.
در عمل، انواع مختلفی از درایورهای استپر موتور در بازار وجود دارند که بسته به جریان موتور و کاربرد مورد نظر انتخاب میشوند. از جمله نمونههای رایج میتوان به A4988 ،DRV8825 و TB6600 اشاره کرد که در پروژههای الکترونیکی، پرینترهای سهبعدی و دستگاههای CNC کاربرد گستردهای دارند.
نحوه انتخاب استپر موتور مناسب
برای انتخاب استپر موتور مناسب، باید میان نیاز مکانیکی پروژه و ویژگیهای الکتریکی موتور تعادل برقرار شود. در ادامه مهمترین پارامترهایی که در انتخاب تأثیرگذارند معرفی شدهاند:
۱. گشتاور (Torque)
مقدار گشتاور تعیین میکند موتور تا چه اندازه میتواند بار را به حرکت درآورد. اگر گشتاور کافی نباشد، موتور در حین حرکت گامها را از دست میدهد.
موتورهای بزرگتر سری NEMA (مثلاً NEMA 23 در مقایسه با NEMA 17) گشتاور بیشتری دارند اما مصرف جریان و وزن بیشتری نیز ایجاد میکنند.
۲. زاویه گام (Step Angle)
زاویه گام مشخص میکند هر پالس کنترل چه مقدار چرخش ایجاد میکند. زاویههای متداول ۱.۸° (۲۰۰ گام در هر دور) و ۰.9° (۴۰۰ گام در دور) هستند. زاویه گام کوچکتر دقت حرکتی بالاتری ایجاد میکند، اما سرعت نهایی کاهش مییابد.
۳. جریان نامی و ولتاژ کاری
هر استپر موتوری دارای جریان نامی است که باید توسط درایور تأمین شود. انتخاب درایور متناسب با جریان موتور اهمیت زیادی دارد. معمولاً ولتاژ تغذیه از مقدار نامی بیشتر انتخاب میشود تا سرعت افزایش میدان (و در نتیجه سرعت چرخش) بهتر باشد، درحالیکه درایور با محدودسازی جریان از آسیب جلوگیری میکند.
۴. نوع شفت و ابعاد نصب (استاندارد NEMA)
استاندارد NEMA تنها به ابعاد مکانیکی مربوط است و تعیینکننده فاصله پیچهای نصب و قطر شفت موتور است, نه توان یا گشتاور. به همین دلیل، هنگام جایگزینی یا طراحی مکانیکی باید نوع NEMA دقیق (مثل NEMA 17 یا 23) لحاظ شود.
۵. شرایط کاری و نوع بار
در انتخاب موتور باید به شرایط واقعی سیستم نیز توجه شود:
- بار دائمی یا لحظهای است؟
- حرکت افقی است یا عمودی (درگیر با نیروی وزن)؟
- نیاز به گشتاور نگهدارنده وجود دارد یا خیر؟
نکته: بهترین روش انتخاب موتور این است که ابتدا گشتاور بار محاسبه یا تخمین زده شود، سپس موتوری انتخاب شود که گشتاور نامی آن حدود ۳۰٪ بیشتر از گشتاور مورد نیاز سیستم باشد تا در برابر افت عملکرد یا نوسانات تغذیه اطمینان ایجاد شود.
مزایا و معایب استپر موتور
استپر موتورها به دلیل کنترل دقیق موقعیت و سادگی در کنترل، در بسیاری از سیستمهای حرکتی مورد استفاده قرار میگیرند. با این حال مانند هر فناوری دیگری، این موتورها نیز مزایا و محدودیتهای خاص خود را دارند.
مزایا
- کنترل دقیق موقعیت: حرکت موتور به صورت گامهای مشخص انجام میشود، بنابراین میتوان موقعیت شفت را بدون نیاز به سنسور فیدبک با دقت خوبی کنترل کرد.
- کنترل ساده: بسیاری از درایورها تنها با سیگنالهای STEP و DIR کنترل میشوند و پیادهسازی آنها با میکروکنترلرها بسیار آسان است.
- گشتاور نگهدارنده: در حالت توقف نیز میتوانند موقعیت خود را حفظ کنند و در برابر تغییر مکان مقاومت نشان دهند.
- قابلیت حرکت با سرعتهای بسیار کم: استپر موتورها میتوانند بدون نیاز به گیربکس با سرعتهای پایین و کنترل دقیق حرکت کنند.
- دقت بالا در صورت استفاده از Microstepping: با استفاده از درایورهای مناسب میتوان دقت حرکتی موتور را بیشتر کرد.
معایب
- کاهش گشتاور در سرعتهای بالا: با افزایش سرعت، گشتاور قابل دسترس موتور کاهش پیدا میکند.
- مصرف جریان حتی در حالت توقف: برای حفظ موقعیت، معمولاً باید جریان در سیمپیچها برقرار بماند.
- احتمال از دست رفتن گامها: در صورت اعمال بار بیش از حد یا شتاب زیاد، ممکن است موتور برخی گامها را از دست بدهد.
- بازده انرژی کمتر نسبت به برخی موتورهای دیگر: بهویژه در کاربردهایی که حرکت پیوسته با سرعت بالا نیاز است.
با توجه به این ویژگیها، استپر موتورها بیشتر در سیستمهایی استفاده میشوند که کنترل دقیق موقعیت و حرکت مرحلهای اهمیت دارد. به عنوان مثال در پرینترهای سهبعدی، دستگاههای CNC، رباتیک و تجهیزات اتوماسیون استفاده می شوند.
کاربردهای استپر موتور
استپر موتورها به دلیل دقت بالا در کنترل موقعیت، سادگی راهاندازی و قابلیت حرکت مرحلهای، در طیف گستردهای از کاربردهای صنعتی و نیمهصنعتی مورد استفاده قرار میگیرند. در ادامه مهمترین کاربردهای آنها معرفی شده است:
- پرینترهای سهبعدی: برای کنترل دقیق محورهای حرکتی (X، Y و Z) و تغذیه فیلامنت
- دستگاههای CNC و حکاکی: ایجاد حرکتهای دقیق و تکرارپذیر در ماشینکاری
- رباتیک و بازوهای رباتیک: کنترل زاویه و موقعیت مفاصل
- اتوماسیون صنعتی: موقعیتیابی قطعات، کنترل ولوها و سیستمهای خط تولید
- دوربینها و تجهیزات اپتیکی: فوکوس خودکار، تنظیم لنز و سیستمهای Pan/Tilt
- تجهیزات پزشکی و آزمایشگاهی: کنترل حرکت دقیق در پمپها، آنالایزرها و دستگاههای اندازهگیری
- الکترونیک و پروژههای آموزشی: بهویژه در سیستمهای مبتنی بر آردوینو و رزبریپای
به طور کلی، هرجا که کنترل دقیق موقعیت بدون نیاز به فیدبک پیچیده مورد نیاز باشد، استپر موتور یکی از گزینههای اصلی محسوب میشود.
نظر یادتون نره…


