
در این پست از سایت اِمیک, یک پست آموزشی با عنوان آشنایی با ماژول درایور استپر موتور TB6600 قرار داده شده است. این پست شامل تمام اطلاعات لازم برای آشنایی با ماژول TB6600 و مشخصات و قابلیت های آن می باشد. همچنین نحوه راه اندازی و کار با این ماژول و عملکرد پایه ها آن و اتصال ماژول به میکروکنترلر, تغذیه و استپر موتور کاملاً توضیح داده شده است.

معرفی ماژول درایور استپر موتور TB6600
ماژول TB6600 یک درایور آماده برای کنترل استپر موتورهای دو فاز (Bipolar Stepper Motor) است که امکان راهاندازی این موتورها را بدون نیاز به طراحی مدار درایور فراهم میکند. در این ماژول، آیسی درایور به همراه مجموعهای از قطعات جانبی مورد نیاز روی یک برد مجتمع شده است تا کاربر بتواند تنها با اتصال تغذیه، موتور و سیگنالهای کنترلی، موتور را بهسادگی کنترل کند.
در واقع، ماژول TB6600 نسخهی آماده و کاربردی مبتنی بر آیسی TB6600HG است. در حالی که استفاده مستقیم از آیسی نیازمند طراحی مدار تغذیه، مدار قدرت، حفاظتها و تنظیمات جریان است، در این ماژول تمام این بخشها از قبل طراحی و پیادهسازی شدهاند. به همین دلیل استفاده از آن در پروژههای عملی بسیار سادهتر و سریعتر خواهد بود.
این ماژول بهطور گسترده در سیستمهای حرکتی دقیق مورد استفاده قرار میگیرد. از جمله کاربردهای رایج آن میتوان به ماشینهای CNC، پرینترهای سهبعدی، دستگاههای برش لیزر، تجهیزات اتوماسیون صنعتی، رباتیک و انواع سیستمهای موقعیتیابی دقیق اشاره کرد. قابلیت کنترل دقیق حرکت و امکان تنظیم جریان و میکرواستپ باعث شده است که این ماژول گزینهای مناسب برای بسیاری از کاربردهای کنترلی باشد.
ویژگیهای اصلی ماژول TB6600
بر اساس مشخصات ارائهشده توسط سازنده، ماژول TB6600 دارای ویژگیهای مهم زیر است:
- پشتیبانی از تنظیم جریان خروجی در هشت سطح مختلف در بازه تقریبی 0.5 تا 3.5 آمپر
- پشتیبانی از چندین حالت میکرواستپ برای افزایش دقت حرکت موتور
- استفاده از اپتوکوپلر در ورودیهای کنترلی جهت ایزولهسازی سیگنالها و کاهش اثر نویز
- قابلیت کاهش خودکار جریان موتور در حالت توقف برای کاهش تولید حرارت
- وجود هیتسینک آلومینیومی برای دفع مؤثر حرارت
- برخورداری از مدارهای حفاظتی در برابر اضافهجریان، افزایش دما و اتصال کوتاه
- محدوده ولتاژ تغذیه در بازه 9 تا 42 ولت DC
وجود این امکانات باعث میشود که ماژول TB6600 بتواند استپر موتورهایی با توان نسبتاً بالا را با پایداری مناسب کنترل کند.
اجزای اصلی موجود روی ماژول
در ساختار این ماژول، علاوه بر آیسی اصلی درایور، چند بخش مهم دیگر نیز وجود دارد که هر کدام نقش مشخصی در عملکرد سیستم دارند. مهمترین اجزای قابل مشاهده روی برد عبارتاند از:
- آیسی درایور TB6600 که وظیفه کنترل جریان و توالی تحریک سیمپیچهای موتور را بر عهده دارد.
- ترمینالهای پیچی برای اتصال منبع تغذیه و سیمهای موتور.
- ورودیهای سیگنال کنترلی شامل پالس، جهت و فعالسازی که معمولاً به میکروکنترلر یا کنترلر CNC متصل میشوند.
- دیپسوئیچهای تنظیمات که برای تعیین مقدار جریان موتور و حالت میکرواستپ استفاده میشوند.
- هیتسینک فلزی که برای دفع گرمای تولید شده در مدار قدرت در نظر گرفته شده است.
ساختار سختافزاری ماژول TB6600
ماژول TB6600 تنها یک آیسی درایور ساده نیست، بلکه یک برد کامل و آماده به کار است که مجموعهای از مدارهای حفاظتی، ایزولاسیون ورودی، تنظیمات کنترلی و اجزای کمکی را در کنار هم قرار میدهد. شناخت این اجزا باعث میشود در هنگام سیمبندی و تنظیمات، خطاهای احتمالی به حداقل برسد و بتوانید از ماژول با بالاترین کارایی استفاده کنید.
در ادامه، مهمترین بخشهای سختافزاری این ماژول را بررسی میکنیم.
آیسی درایور TB6600 (هسته اصلی ماژول)
مرکز اصلی عملکرد ماژول، آیسی TB6600HG یا مدلهای سازگار آن است که روی برد نصب شده و توسط یک هیتسینک آلومینیومی پوشانده میشود.
این آیسی مسئولیتهای زیر را بر عهده دارد:
- کنترل جریان هر فاز موتور
- تولید میکرواستپ
- مدیریت گامها
- محافظت در برابر حرارت و اضافهجریان
هیتسینک آلومینیومی بزرگ
روی اکثر ماژولهای TB6600 یک هیتسینک آلومینیومی مشکی یا نقرهای نصب شده است که وظیفه آن:
- انتقال حرارت از آیسی TB6600
- جلوگیری از داغ شدن مدار در جریانهای بالا
- افزایش پایداری در استفاده طولانیمدت
به دلیل جریانهای ۳ تا ۴ آمپر، وجود این هیتسینک ضروری است و جدا کردن آن توصیه نمیشود.
اپتوکوپلرهای ورودی (ایزولاسیون سیگنال)
در بخش ورودی ماژول، چند اپتوکوپلر قرار داده شدهاند که بین سیگنالهای کنترلی (PUL، DIR، EN) و مدار قدرت، ایزولاسیون الکتریکی ایجاد میکنند.
مزایای آن:
- جلوگیری از ورود نویز به میکروکنترلر
- محافظت در برابر اختلاف سطح ولتاژ
- امکان استفاده از ولتاژهای مختلف در ورودیها
به همین دلیل ورودیهای PUL± و DIR± و EN± به صورت جفتهای مثبت و منفی طراحی شدهاند.
دیپسوئیچهای تنظیمات
روی ماژول معمولاً ۶ عدد دیپسوئیچ قرار دارد:
- سوئیچهای 1 تا 3: تنظیم سطح میکرواستپ
- سوئیچهای 4 تا 6: تنظیم حداکثر جریان خروجی موتور
مزیت این روش، تنظیمات ساده و بدون نیاز به لحیمکاری است.
ترمینالهای اتصال پیچی
ماژول دارای ترمینالهای مجزاست که در سه گروه قرار دارند:
-
ترمینالهای تغذیه:
- VCC
- GND
-
ترمینالهای اتصال موتور:
- A+ و A-
- B+ و B-
-
ترمینالهای سیگنال کنترلی:
- PUL+ و PUL−
- DIR+ و DIR−
- EN+ و EN−
ترمینالهای پیچی باعث میشوند سیمها محکم ثابت شده و اتصالات مطمئن باشند.
مدار تغذیه داخلی و رگولاتورها
بسته به نوع طراحی ماژول (مدلهای متفاوت بازار)، روی برد ممکن است یک یا چند رگولاتور ولتاژ برای تغذیه بخشهای منطقی وجود داشته باشد. این بخش وظیفه دارد ولتاژ مناسب را برای قسمت های زیر تأمین کند.
- مدارهای کنترلی
- اپتوکوپلرها
- آیسی اصلی (ورودیهای Logic)
مدارهای محافظتی جانبی
اغلب نسخههای TB6600 دارای برخی مدارهای محافظتی هستند مثل:
- مدار Soft-Start ابتدایی
- مدار جلوگیری از Back-EMF موتور
- خازنهای بزرگ الکترولیتی برای جلوگیری از جهش ولتاژ
- دیودهای محافظ
هرچند این بخشها بسته به سازنده ماژول ممکن است کمی متفاوت باشند، ولی تقریباً در همه مدلها وجود دارند.
برد PCB و مسیرهای جریان بالا
ماژول دارای PCB چندلایه یا تکلایه با ضخامت نسبتاً زیاد است. مسیرهای A/+A− و B/+B− معمولاً پهنتر طراحی شدهاند تا تحمل جریانهای ۳ تا ۴ آمپر را داشته باشند.
معرفی ترمینالها و اتصالات ماژول TB6600
برای راهاندازی و استفاده صحیح از ماژول TB6600 لازم است ابتدا با ترمینالها و اتصالات آن آشنا شویم. این ماژول برای سادهتر شدن سیمبندی، تمام ورودیها و خروجیهای خود را بهصورت ترمینالهای پیچی روی برد قرار داده است. این ترمینالها امکان اتصال مطمئن سیمها را فراهم میکنند و در کاربردهای صنعتی نیز بسیار رایج هستند.
به طور کلی ترمینالهای ماژول TB6600 را میتوان در سه دسته اصلی ترمینالهای تغذیه، ترمینالهای اتصال موتور و ورودیهای سیگنال کنترلی قرار داد.
ترمینالهای تغذیه
برای کار کردن ماژول، ابتدا باید منبع تغذیه DC به آن متصل شود. این کار از طریق دو ترمینال زیر انجام میشود.
VCC : این ترمینال به قطب مثبت منبع تغذیه متصل میشود. در اغلب ماژولهای TB6600 محدوده ولتاژ تغذیه بین 9 تا 42 ولت DC است. انتخاب ولتاژ مناسب معمولاً به مشخصات استپر موتور و سرعت مورد نیاز سیستم بستگی دارد.
GND : این ترمینال به قطب منفی منبع تغذیه متصل میشود و به عنوان مرجع ولتاژ مدار عمل میکند.
در هنگام اتصال منبع تغذیه باید به پلاریته صحیح توجه کرد، زیرا اتصال اشتباه میتواند باعث آسیب دیدن درایور شود.
ترمینالهای اتصال استپر موتور
برای اتصال استپر موتور به درایور، چهار ترمینال خروجی روی ماژول در نظر گرفته شده است. این ترمینالها به دو سیمپیچ داخلی موتور متصل میشوند.
A+ و A- : این دو ترمینال به یک سیمپیچ موتور متصل میشوند.
B+ و B- : این دو ترمینال به سیمپیچ دوم موتور متصل میشوند.
استپر موتورهای دو فاز معمولاً دارای چهار سیم خروجی هستند که هر جفت سیم مربوط به یک سیمپیچ است. هر جفت سیم باید به یکی از ترمینالهای A یا B متصل شود. در صورتی که ترتیب سیمها برعکس متصل شود، تنها جهت چرخش موتور تغییر میکند و مشکلی برای درایور ایجاد نمیشود.
ورودیهای سیگنال کنترلی
حرکت استپر موتور در این ماژول از طریق سه سیگنال دیجیتال کنترل میشود. این سیگنالها معمولاً از یک میکروکنترلر، برد Arduino، کنترلر CNC یا هر منبع تولید پالس دیجیتال ارسال میشوند.
به دلیل استفاده از اپتوکوپلر در ورودیها، هر سیگنال به صورت یک جفت پایه مثبت و منفی ارائه شده است.
PUL+ و PUL- : این ورودی برای دریافت پالسهای کنترلی حرکت استفاده میشود. هر پالس اعمال شده به این ورودی باعث حرکت موتور به اندازه یک گام یا میکرواستپ میشود. در نتیجه سرعت چرخش موتور به فرکانس پالسهای اعمال شده بستگی دارد.
DIR+ و DIR- : این ورودی جهت چرخش موتور را تعیین میکند. با تغییر وضعیت منطقی این سیگنال، جهت حرکت موتور بین ساعتگرد و پادساعتگرد تغییر میکند.
EN+ و EN- : این ورودی برای فعال یا غیرفعال کردن درایور استفاده میشود. زمانی که درایور غیرفعال شود، جریان سیمپیچهای موتور قطع شده و موتور در حالت آزاد قرار میگیرد.
نحوه اتصال استپر موتور به ماژول TB6600
پس از آشنایی با ترمینالهای ماژول، مرحله بعدی اتصال صحیح استپر موتور به درایور است. ماژول TB6600 برای راهاندازی استپر موتورهای دو فاز (Bipolar Stepper Motor) طراحی شده و به همین دلیل دارای چهار ترمینال خروجی برای اتصال سیمپیچهای موتور است.
اتصال صحیح سیمپیچهای موتور اهمیت زیادی دارد، زیرا در صورت اتصال اشتباه ممکن است موتور بهدرستی حرکت نکند یا دچار لرزش شود.
شناسایی سیمپیچهای استپر موتور
استپر موتورهای دو فاز معمولاً دارای چهار سیم خروجی هستند که هر دو سیم مربوط به یک سیمپیچ داخلی موتور هستند. برای اتصال صحیح موتور به درایور ابتدا باید این دو سیمپیچ را شناسایی کرد.
یکی از روشهای ساده برای شناسایی سیمپیچها استفاده از مولتیمتر در حالت اندازهگیری مقاومت است. در این روش:
- دو سیمی که بین آنها مقاومت کم اندازهگیری میشود، متعلق به یک سیمپیچ هستند.
- دو سیم دیگر مربوط به سیمپیچ دوم موتور خواهند بود.
پس از شناسایی سیمپیچها، هر جفت سیم باید به یکی از خروجیهای درایور متصل شود.
اتصال سیمپیچها به ترمینالهای ماژول
برای اتصال موتور به ماژول TB6600 از چهار ترمینال A+ و A- و B+ و B- استفاده میشود. یکی از سیمپیچهای موتور به ترمینالهای A+ و A- متصل میشود و سیمپیچ دیگر به B+ و B- متصل خواهد شد.
در صورتی که ترتیب سیمهای یک سیمپیچ جابجا شود، تنها جهت چرخش موتور تغییر میکند و آسیبی به درایور وارد نمیشود. همچنین بهتر است در زمان سیمبندی، منبع تغذیه ماژول خاموش باشد تا از آسیب احتمالی جلوگیری شود.
اتصال موتورهای شش یا هشت سیمه
برخی استپر موتورها دارای شش یا هشت سیم خروجی هستند. این موتورها در اصل دارای سیمهای میانی (Center Tap) در سیمپیچها هستند و میتوان آنها را به روشهای مختلف سیمبندی کرد.
در استفاده با ماژول TB6600 معمولاً این موتورها به صورت Bipolar سیمبندی میشوند. در این حالت فقط از دو سر هر سیمپیچ استفاده شده و سیمهای میانی به کار گرفته نمیشوند.
برای اتصال صحیح این نوع موتورها ابتدا باید با استفاده از دیتاشیت موتور یا اندازهگیری مقاومت سیمها، سیمهای مربوط به هر سیمپیچ مشخص شوند.
نحوه اتصال سیگنالهای کنترلی به ماژول TB6600
بخش سیگنالهای کنترلی رابط بین میکروکنترلر و ماژول درایور TB6600 است. میکروکنترلر با ارسال این سیگنالها مشخص میکند که موتور چه زمانی حرکت کند، در چه جهتی بچرخد و آیا درایور فعال باشد یا نباشد.
سه سیگنال کنترلی اصلی در این ماژول عبارتاند از:
- PUL (Pulse)
- DIR (Direction)
- EN (Enable)
به دلیل اینکه سیگنالهای خروجی میکروکنترلر معمولاً با ولتاژهای پایین مانند ۳.۳ ولت یا ۵ ولت کار میکنند، در ماژول TB6600 از اپتوکوپلر برای ایزولهسازی ورودیها استفاده شده است. این ایزولاسیون از میکروکنترلر در برابر نویزهای الکتریکی و نوسانات ناشی از مدار قدرت موتور محافظت میکند.
سیگنال پالس (PUL)
این سیگنال تعیینکننده حرکت موتور است. نحوه عملکرد آن به این صورت است که هر بار یک پالس از میکروکنترلر به ورودی PUL ارسال شود، درایور یک فرمان حرکت به موتور میدهد. مقدار این حرکت به تنظیم میکرواستپ بستگی دارد. به عبارت دیگر هر پالس میکروکنترلر باعث حرکت یک گام یا میکرواستپ در موتور می شود.
کنترل سرعت موتور نیز از طریق همین سیگنال انجام میشود. هرچه فرکانس پالسهای تولید شده توسط میکروکنترلر بیشتر باشد، موتور با سرعت بیشتری میچرخد.
برای اتصال این سیگنال معمولاً خروجی پالس میکروکنترلر به PUL+ و زمین میکروکنترلر به PUL- متصل می شود.
سیگنال جهت (DIR)
این سیگنال جهت چرخش موتور را مشخص میکند. پایه DIR یک ورودی منطقی است که با تغییر وضعیت آن میتوان جهت چرخش موتور را تغییر داد. به عنوان مثال با سطح منطقی LOW حرکت در یک جهت و سطح منطقی HIGH حرکت در جهت مخالف انجام می شود.
جهت واقعی چرخش علاوه بر سیگنال DIR به نحوه اتصال سیمهای موتور نیز وابسته است. اگر موتور در جهت مورد نظر حرکت نکرد، میتوان منطق برنامه میکروکنترلر را تغییر داد یا ترتیب سیمهای یکی از فازهای موتور را جابجا کرد.
برای اتصال این سیگنال معمولاً خروجی دیجیتال میکروکنترلر به DIR+ و زمین میکروکنترلر به DIR- متصل می شود.
سیگنال فعالسازی (EN)
سیگنال Enable برای فعال یا غیرفعال کردن درایور استفاده میشود. این پایه در بسیاری از کاربردها اختیاری است، اما در برخی سیستمها برای مدیریت مصرف توان یا آزاد کردن محور مکانیکی کاربرد دارد.
حالتهای عملکرد این سیگنال:
- EN فعال : درایور فعال است و موتور تحت کنترل قرار دارد.
- EN غیرفعال : جریان سیمپیچهای موتور قطع میشود و موتور در حالت آزاد (Free Wheel) قرار میگیرد. در این حالت موتور گشتاور نگهدارنده ندارد و میتوان آن را با دست چرخاند.
برای اتصال این سیگنال معمولاً خروجی دیجیتال میکروکنترلر به EN+ و زمین میکروکنترلر به EN- متصل می شود.
نکات مهم در سیمبندی سیگنالها
- ولتاژ سیگنالهای کنترلی باید با سطح ولتاژ خروجی میکروکنترلر (معمولاً ۳٫۳ یا ۵ ولت) سازگار باشد تا ماژول TB6600 بتواند سیگنالها را بهدرستی تشخیص دهد.
- سیمهای سیگنال تا حد امکان کوتاه نگه داشته شوند تا نویز کاهش یابد.
- زمین (GND) میکروکنترلر باید با زمین درایور مشترک باشد تا مرجع ولتاژ سیگنالها درست تعریف شود.
در عمل، میکروکنترلر با تولید پالس روی ورودی PUL و کنترل وضعیت DIR میتواند سرعت، تعداد گامها و جهت چرخش موتور را بهطور دقیق کنترل کند.
روشهای متداول سیمبندی ورودیها
ورودیهای کنترلی ماژول TB6600 به کمک اپتوکوپلر ایزوله شدهاند. به همین دلیل هر سیگنال کنترلی دارای یک پایه مثبت و یک پایه منفی (مانند PUL+ و PUL-) است. این ساختار باعث میشود که بتوان ورودیها را به دو روش رایج Common Anode و Common Cathode سیمبندی کرد.
روش Common Anode
در این روش پایههای مثبت سیگنالها به ولتاژ مثبت متصل میشوند:
- PUL+ و DIR+ و EN+ به 5V+ ولت متصل می شوند.
- PUL- و DIR- و EN- به خروجیهای میکروکنترلر متصل می شوند.
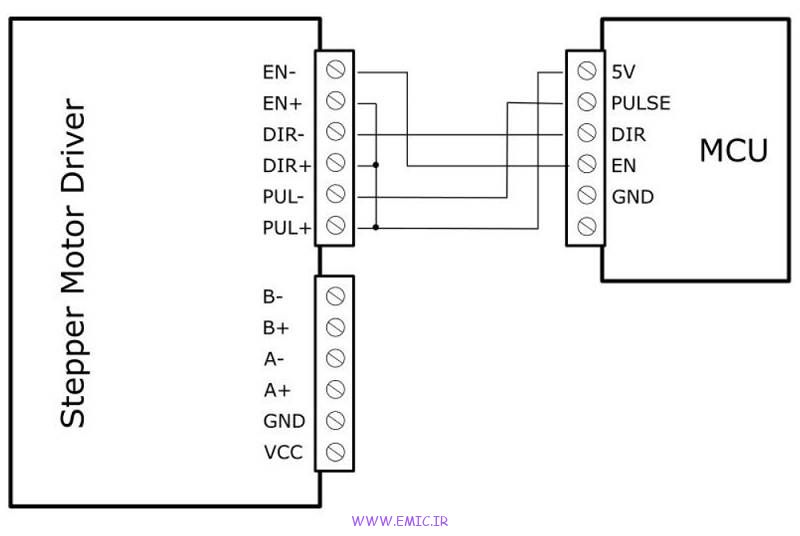
در این روش، میکروکنترلر پایه های منفی سیگنالهای کنترلی را GND یا سطح پایین (LOW) می کند و باعث فعال شدن اپتوکوپلر میشود. این نوع اتصال در بسیاری از سیستمهای CNC و کنترلرهای صنعتی رایج است.
روش Common Cathode
در این روش پایههای منفی مشترک هستند:
- PUL- و DIR- و EN- به GND متصل می شوند.
- PUL+ و DIR+ و EN+ به خروجیهای میکروکنترلر متصل می شوند.
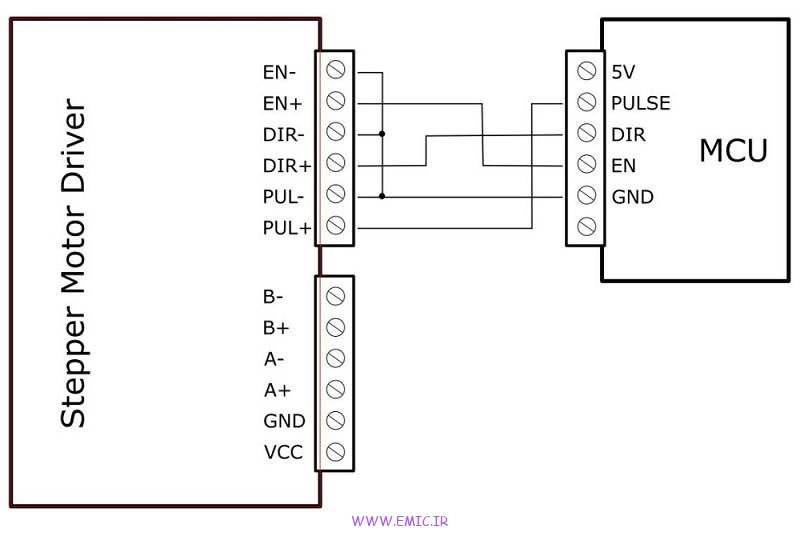
در این روش، میکروکنترلر پایه های مثبت سیگنالهای کنترلی را 5V+ یا سطح بالا (HIGH) می کند و باعث فعال شدن اپتوکوپلر میشود. این نوع اتصال معمولاً در پروژههایی که از میکروکنترلرها مانند Arduino، STM32 یا ESP32 استفاده میشود، بسیار متداول است.
هر دو روش عملکرد مشابهی دارند و انتخاب آنها معمولاً به نوع طراحی مدار کنترل و سطح ولتاژ میکروکنترلر بستگی دارد.
تنظیم میکرواستپ در ماژول TB6600
یکی از قابلیتهای مهم ماژول TB6600 امکان استفاده از میکرواستپ (Microstepping) است. در این روش هر گام کامل موتور به چند بخش کوچکتر تقسیم میشود و در نتیجه حرکت موتور نرمتر و دقیقتر خواهد بود.
در ماژول TB6600 تنظیم میکرواستپ با استفاده از دیپسوئیچهای S2 ،S1 و S3 انجام میشود. با تغییر وضعیت این سوئیچها میتوان تعداد گامهای موتور در هر دور را افزایش داد.
به طور کلی هرچه مقدار میکرواستپ بیشتر باشد:
- حرکت موتور نرمتر میشود
- دقت موقعیتیابی افزایش پیدا میکند
- اما گشتاور در سرعتهای بالا ممکن است کمی کاهش یابد
حالتهای میکرواستپ
ماژول TB6600 چندین حالت مختلف برای تقسیم گام ارائه میدهد. برخی از حالتهای رایج عبارتاند از:
- Full Step (1) (یک گام کامل)
- 1/2 Step (تقسیم هر گام به ۲ بخش)
- 1/4 Step
- 1/8 Step
- 1/16 Step
- 1/32 Step
به عنوان مثال اگر یک استپر موتور استاندارد دارای ۲۰۰ گام در هر دور باشد:
- در حالت Full Step به ۲۰۰ پالس برای یک دور کامل نیاز دارد
- در حالت 1/8 Step به ۱۶۰۰ پالس برای یک دور کامل نیاز دارد
- در حالت 1/32 Step به ۶۴۰۰ پالس برای یک دور کامل نیاز دارد
تنظیم دیپسوئیچها
برای انتخاب حالت میکرواستپ باید وضعیت سوئیچهای S2 ،S1 و S3 مطابق جدول تنظیمات ماژول تغییر داده شود. هر ترکیب از این سوئیچها یک مقدار مشخص از میکرواستپ را فعال میکند.
| Microstep | Pulse/rev | S1 | S2 | S3 |
|---|---|---|---|---|
| NC | NC | ON | ON | ON |
| 1 | 200 | ON | ON | OFF |
| 2/A | 400 | ON | OFF | ON |
| 2/B | 400 | OFF | ON | ON |
| 4 | 800 | ON | OFF | OFF |
| 8 | 1600 | OFF | ON | OFF |
| 16 | 3200 | OFF | OFF | ON |
| 32 | 6400 | OFF | OFF | OFF |
به همین دلیل قبل از راهاندازی سیستم بهتر است حالت میکرواستپ مورد نظر مشخص شود و سوئیچها مطابق جدول تنظیمات ماژول تنظیم شوند.
انتخاب مقدار مناسب میکرواستپ
در بسیاری از کاربردهای عملی معمولاً از مقادیر 1/8 یا 1/16 میکرواستپ استفاده میشود. این حالتها تعادل مناسبی بین دقت حرکت، نرمی حرکت و گشتاور موتور ایجاد میکنند.
استفاده از مقادیر بسیار بزرگ میکرواستپ همیشه ضروری نیست، زیرا در برخی کاربردها افزایش بیش از حد تعداد پالسها میتواند بار پردازشی میکروکنترلر را افزایش دهد.
تنظیم جریان خروجی موتور در ماژول TB6600
تنظیم صحیح جریان در ماژول TB6600 اهمیت زیادی دارد، زیرا این مقدار مستقیماً بر گشتاور موتور، میزان گرما و طول عمر آن تأثیر میگذارد. اگر جریان بیش از حد تنظیم شود موتور داغ میشود و ممکن است آسیب ببیند، و اگر جریان کمتر از مقدار موردنیاز باشد موتور گشتاور کافی نخواهد داشت و ممکن است در زیر بار گام از دست بدهد.
نحوه تنظیم جریان
تنظیم جریان خروجی در این ماژول توسط سه دیپسوئیچ S5 ،S4 و S6 انجام میشود. هر ترکیب از وضعیت ON و OFF این سوئیچها مقدار مشخصی از جریان خروجی را تعیین میکند.
| Current (A) | PK Current | S4 | S5 | S6 |
|---|---|---|---|---|
| 0.5 | 0.7 | ON | ON | ON |
| 1.0 | 1.2 | ON | OFF | ON |
| 1.5 | 1.7 | ON | ON | OFF |
| 2.0 | 2.2 | ON | OFF | OFF |
| 2.5 | 2.7 | OFF | ON | ON |
| 2.8 | 2.9 | OFF | OFF | ON |
| 3.0 | 3.2 | OFF | ON | OFF |
| 3.5 | 4.0 | OFF | OFF | OFF |
Current (A) جریان مؤثر و همان جریان نامی موتور است که باید برای تنظیم درایور در نظر گرفته شود، در حالی که PK Current فقط مقدار جریان پیک لحظهای درایور میباشد.
انتخاب مقدار مناسب جریان
برای انتخاب مقدار مناسب، ابتدا جریان نامی فاز موتور را از دیتاشیت یا برچسب روی موتور بررسی کنید و سپس نزدیکترین مقدار را در جدول انتخاب نمایید. پس از راهاندازی، بهتر است دمای موتور بررسی شود. گرم شدن ملایم طبیعی است اما دمای بسیار بالا نشاندهنده تنظیم جریان بیش از حد است.
حالت کاهش خودکار جریان
ماژول TB6600 دارای قابلیت کاهش خودکار جریان در حالت توقف موتور است. در صورتی که موتور برای مدتی حرکت نکند، درایور جریان را کاهش میدهد تا از گرم شدن بیش از حد موتور جلوگیری شود و مصرف توان کاهش یابد.
راهاندازی اولیه و تولید پالس برای حرکت موتور
پس از اتصال صحیح منبع تغذیه، استپر موتور و سیگنالهای کنترلی به ماژول TB6600، حرکت موتور با ارسال پالس از طریق میکروکنترلر کنترل میشود. همانطور که قبلا هم گفته شد، این درایور سه ورودی کنترلی اصلی به نام های PUL برای ایجاد پالسهای حرکتی، DIR برای تعیین جهت چرخش و ENA برای فعال یا غیرفعال کردن درایور دارد.
مهمترین سیگنال در کنترل حرکت، ورودی PUL است. هر پالس ارسالی به این ورودی باعث میشود موتور یک گام یا یک میکرواستپ حرکت کند. بنابراین تعداد پالسها مقدار چرخش موتور را تعیین میکند. برای مثال اگر موتور دارای ۲۰۰ گام در هر دور باشد، در حالت Full Step با ۲۰۰ پالس یک دور کامل میزند، اما در حالت 1/8 Microstep برای یک دور کامل به ۱۶۰۰ پالس نیاز خواهد بود.
ورودی DIR جهت چرخش موتور را مشخص میکند و با تغییر سطح منطقی آن میتوان جهت حرکت را بین ساعتگرد و پادساعتگرد تغییر داد. پایه ENA نیز برای فعال یا غیرفعال کردن درایور استفاده میشود و در بسیاری از کاربردها بهصورت دائمی در حالت فعال قرار میگیرد.
سرعت چرخش موتور به فرکانس پالسهای ارسالی به ورودی PUL بستگی دارد. هرچه فرکانس بیشتر باشد سرعت موتور نیز افزایش مییابد. در عمل این پالسها معمولاً با استفاده از تایمرهای داخلی میکروکنترلر یا ایجاد تأخیرهای دقیق در برنامه تولید میشوند.
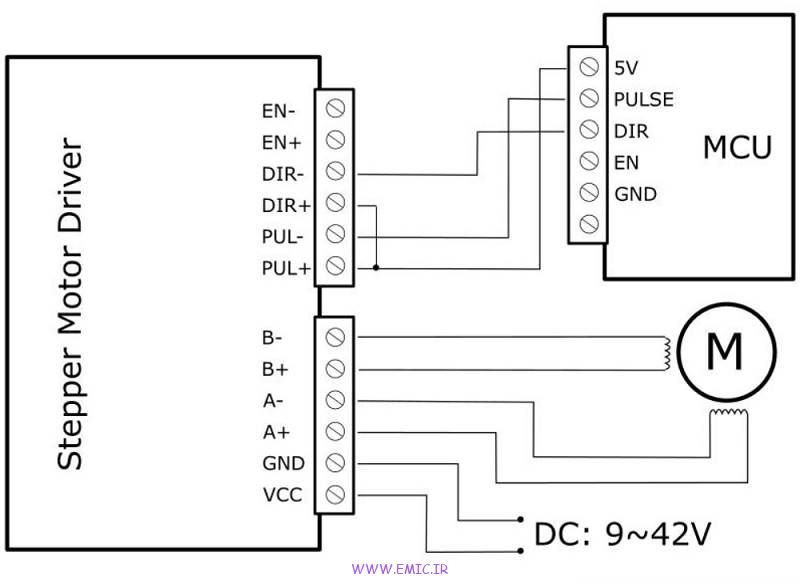
در تصویر بالا نحوه اتصال میکروکنترلر, استپر موتور و منبع تغذیه به ماژول درایور مشخص شده است که اتصال به روش Common Anode انجام شده است و پایه EN نیز متصل نشده و استفاده نشده است.
نکات مهم و جمعبندی
در استفاده از درایور استپر موتور TB6600 رعایت چند نکته عملی میتواند باعث عملکرد بهتر و افزایش عمر سیستم شود. پیش از راهاندازی، لازم است مقدار جریان خروجی درایور متناسب با جریان نامی استپر موتور تنظیم شود تا از داغ شدن موتور یا درایور جلوگیری گردد. همچنین انتخاب مقدار مناسب میکرواستپ میتواند حرکت نرمتر و دقیقتری برای موتور فراهم کند، هرچند افزایش میکرواستپ باعث افزایش تعداد پالسهای موردنیاز برای هر دور موتور خواهد شد.
در هنگام سیمبندی نیز باید به اتصال صحیح سیمپیچهای موتور و پلاریته ورودیهای کنترلی توجه شود. استفاده از منبع تغذیه مناسب و دارای توان کافی برای جلوگیری از افت ولتاژ در زمان کار موتور اهمیت زیادی دارد. در کاربردهای توان بالاتر نیز توصیه میشود ماژول درایور در محیطی با تهویه مناسب نصب شود تا از افزایش بیش از حد دما جلوگیری شود.
به طور کلی ماژول TB6600 یکی از درایورهای پرکاربرد برای کنترل استپر موتورهای دو فاز است که به دلیل قابلیت تحمل جریان بالا، پشتیبانی از میکرواستپهای مختلف و سازگاری با انواع میکروکنترلرها در بسیاری از پروژههای صنعتی، CNC و رباتیک مورد استفاده قرار میگیرد. با رعایت اصول صحیح اتصال و تنظیمات، میتوان از این ماژول برای کنترل دقیق و پایدار حرکت استپر موتور بهره برد.
نظر یادتون نره…


