
در این پست از سایت اِمیک, یک پست آموزشی با عنوان آشنایی با آی سی TB6600 درایور استپر موتور قرار داده شده است. در این پست با آی سی TB6600 و مهم ترین ویژگی ها و مشخصات آن آشنا می شویم و ساختار داخلی و بلوک دیاگرام آن را نیز بررسی می کنیم.
در بسیاری از پروژههای الکترونیکی و صنعتی که نیاز به حرکت دقیق و کنترلشده وجود دارد، از موتورهای پلهای (Stepper Motor) استفاده میشود. این نوع موتورها به دلیل دقت بالا در موقعیتیابی، کنترل ساده و قابلیت حرکت مرحلهای، کاربرد گستردهای در دستگاههایی مانند پرینترهای سهبعدی، دستگاههای CNC، ماشینهای حکاکی لیزری، رباتیک و تجهیزات اتوماسیون صنعتی دارند. با این حال، برای راهاندازی و کنترل صحیح این موتورها نمیتوان آنها را مستقیماً به میکروکنترلر یا مدارهای منطقی متصل کرد، زیرا استپر موتورها به جریان نسبتاً زیادی نیاز دارند و همچنین باید توالی یا دنباله مشخصی از پالسها برای کنترل حرکت آنها ایجاد شود.
در اینجا استفاده از درایور استپ موتور اهمیت پیدا میکند. درایور در واقع یک مدار واسط است که بین میکروکنترلر یا سیستم کنترلی و استپر موتور قرار میگیرد و وظیفه آن تأمین جریان مناسب، مدیریت پالس های تحریک سیمپیچها و کنترل دقیق حرکت موتور است. یکی از درایورهای بسیار پرکاربرد و قابل اعتماد در این زمینه، درایور TB6600 میباشد.

آیسی TB6600 که توسط شرکت Toshiba طراحی و تولید شده است، یک درایور قدرتمند برای کنترل استپر موتورهای دو فاز است. این درایور قادر است استپر موتورها را با جریان بالا و دقت مناسب کنترل کند و به همین دلیل در بسیاری از پروژههای صنعتی و نیمهصنعتی مورد استفاده قرار میگیرد. ماژولها یا بردهای مبتنی بر این آیسی معمولاً قابلیت راهاندازی استپر موتورها با ولتاژ کاری حدود 9 تا 42 ولت و جریان خروجی تا حدود 4 آمپر را دارند که این ویژگی آن را برای کاربردهای سنگینتر نیز مناسب میکند.
یکی از مهمترین مزایای درایور TB6600، پشتیبانی از میکرواستپ (Microstepping) است. این قابلیت باعث میشود حرکت موتور نرمتر، دقیقتر و با لرزش کمتر انجام شود. در این حالت هر پله موتور میتواند به چندین بخش کوچکتر تقسیم شود که نتیجه آن افزایش دقت در کنترل موقعیت و کاهش نویز و لرزش مکانیکی موتور خواهد بود. در ادامه این پست با آیسی درایور استپر موتور TB6600 بیشتر آشنا خواهیم شد.
معرفی آیسی TB6600HG
آیسی TB6600HG یک درایور استپر موتور از نوع PWM chopper، تکتراشه (Single-chip)، بایپولار و سینوسی با قابلیت میکرواستپینگ (Microstepping) است. این درایور امکان کنترل چرخش در هر دو جهت (ساعتگرد و پادساعتگرد) را فراهم میکند و از حالتهای تحریک مختلف شامل ۲ فاز، ۱-۲ فاز، W1-2 فاز، 2W1-2 فاز و 4W1-2 فاز پشتیبانی میکند. با استفاده از این آیسی، یک استپر موتور بایپولار دو فاز را میتوان تنها با ارسال یک سیگنال کلاک (Clock signal) با لرزش بسیار کم و راندمان بالا راهاندازی کرد.
در ادامه برخی از ویژگی های این آی سی که در متن بالا گفته شد را بیشتر توضیح میدهم.
استپر موتور بایپولار دو فاز (Two‑Phase Bipolar Stepper Motor)
نوعی استپر موتور است که دو سیمپیچ اصلی (دو فاز) دارد و هر سیمپیچ فقط دو سر خروجی و بدون سیم وسط (Center Tap) است. در این نوع موتور برای ایجاد میدان مغناطیسی و حرکت روتور، درایور باید جهت جریان را در هر سیمپیچ معکوس کند (بایپولار) و با کنترل جریان در دو فاز A و B به صورت مرحلهای، باعث حرکت پلهای و دقیق موتور میشود.
PWM Chopper
روشی برای کنترل و محدود کردن جریان سیمپیچهای استپر موتور است که در آن ولتاژ بهصورت پالسهای سریع PWM (Pulse Width Modulation) قطع و وصل میشود تا مقدار جریان روی مقدار تنظیمشده ثابت بماند. در این روش وقتی جریان به حد تعیینشده برسد، درایور ولتاژ را موقتاً قطع میکند و دوباره وصل میکند؛ به این عمل چاپینگ (Chopping) گفته میشود. این تکنیک باعث کنترل دقیق جریان، کاهش تلفات و بهبود عملکرد میکرواستپ در استپر موتور میشود.
تکتراشه (Single-chip)
یعنی تمام مدارات قدرت و کنترل مورد نیاز برای درایو کردن موتور، درون همین یک قطعه (آیسی) جمع شده است.
میکرواستپ (Micro-step)
قابلیتی است که به جای چرخاندن موتور در گامهای بزرگ و پلهای، گامها را به قطعات ریزتر تقسیم میکند تا حرکت موتور بسیار نرم، بدون لرزش و دقیقتر شود.
سینوسی
حالت سینوسی یعنی جریان در دو سیمپیچ استپر موتور بهصورت تدریجی و شبیه موج سینوسی تغییر میکند. در این حالت وقتی جریان در یک سیمپیچ کمکم زیاد میشود، جریان در سیمپیچ دیگر کم میشود (یا برعکس). این تغییر تدریجی جریان در دو فاز باعث میشود میدان مغناطیسی داخل موتور بهصورت نرم و پیوسته بچرخد و در نتیجه موتور حرکت روانتر و کملرزشتری داشته باشد.
حالتهای تحریک (Excitation Modes)
به روشهای مختلفی گفته میشود که درایور با آنها جریان سیمپیچهای استپر موتور را کنترل میکند تا موتور حرکت کند. هر حالت مشخص میکند کدام فازها فعال باشند و جریان آنها چگونه تغییر کند. بنابراین نوع حرکت، نرمی و دقت موتور متفاوت خواهد بود.
۲‑فاز (2‑Phase): در این حالت هر دو سیمپیچ موتور به طور همزمان فعال هستند. این روش همان Full‑step است و معمولاً گشتاور بالایی ایجاد میکند.
۱‑۲ فاز (1‑2 Phase): در این حالت درایور به صورت متناوب یک فاز و سپس دو فاز را فعال میکند. این روش باعث میشود تعداد موقعیتهای حرکتی بیشتر شود و به آن Half‑step گفته میشود.
W1‑2 فاز (W1‑2 Phase): در این حالت جریان فازها بهصورت تدریجی تغییر میکند تا هر گام موتور به چند بخش کوچکتر تقسیم شود. این روش نوعی میکرواستپ است و حرکت موتور را نرمتر میکند.
حالت های 2W1-2 فاز و 4W1-2 فاز نیز مشابه حالت قبل است اما تقسیم گامها ریزتر انجام میشود، بنابراین حرکت موتور دقیقتر و نرمتر خواهد بود.
کاربردهای آیسی TB6600HG
با توجه به توان خروجی بالا، پشتیبانی از میکرواستپ سینوسی و قابلیت درایو موتورهای دو فاز بایپولار تا ۴٫۵ آمپر، آیسی TB6600HG در طیف وسیعی از تجهیزات حرکتی و سیستمهای موقعیتیابی استفاده میشود. مهمترین کاربردهای عملی آن عبارتاند از:
- دستگاههای CNC و حکاکی لیزر
مناسب برای محورهای X / Y / Z با نیاز به حرکت نرم، دقت بالا و گشتاور کافی
- پرینترهای سهبعدی صنعتی و نیمهصنعتی
برای کنترل اکسترودر و محورهای حرکتی با قابلیت میکرواستپ
-
بازوهای رباتیک، رباتهای سرویسدهنده و تجهیزات Pick & Place
استفاده در مفاصل (Joints) که حرکت دقیق و لرزش کم اهمیت دارد
-
پلاترها، اسکنرها و دستگاههای اداری
برای حرکت خطی آرام و تکرارپذیر
-
ماشینآلات اتوماسیون صنعتی و تسمهنقالههای دقیق
کنترل موقعیت دقیق در مکانیسمهای کوچک و متوسط
-
دستگاههای اندازهگیری و ابزار دقیق (Positioning Stages)
هر جایی که کنترل زاویه و موقعیت با دقت زیر یک درجه لازم باشد
-
ماژولهای آماده بازار (TB6600 Driver Modules)
تقریباً تمام ماژولهای تجاری TB6600 که در CNC و پرینترها استفاده میشود، بر پایه همین آیسی ساخته شدهاند
ویژگیها و مشخصات فنی
در ادامه، مهمترین ویژگیها و مشخصات فنی آیسی TB6600HG گفته شده است.
- درایور تکتراشه (Single‑Chip Driver): درایور استپر موتور بایپولار دو فاز با قابلیت میکرواستپ سینوسی
- مقاومت خروجی کم (Low Ron): مجموع مقاومت ترانزیستورهای بالا و پایین حدود ۰٫۴ اهم (Typical) است که باعث کاهش تلفات حرارتی و افزایش بازدهی میشود
- کنترل جهت چرخش موتور: امکان کنترل چرخش ساعتگرد (CW) و پادساعتگرد (CCW) از طریق پایه جهت
- قابلیت انتخاب گامهای حرکتی: قابلیت تنظیم روی حالتهای ۱/۱، ۱/۲، ۱/۴، ۱/۸ و ۱/۱۶ گام
- محدوده ولتاژ تغذیه موتور (VM): 9 تا 42 ولت DC (حداکثر مطلق: 50 ولت)
- ولتاژ تغذیه بخش منطقی (VDD): 5 ولت DC
- حداکثر جریان خروجی هر فاز: حدود 4.5 آمپر (Peak) برای هر فاز (جریان کاری توصیهشده معمولاً تا حدود 4 آمپر)
- پکیج آیسی: از نوع HZIP25‑P‑1.00F (پکیج عمودی ۲۵ پایه با قابلیت دفع حرارت مناسب)
- مقاومتهای Pull‑down داخلی: پایههای ورودی دارای مقاومت Pull‑down داخلی حدود ۱۰۰ کیلو اهم هستند تا از نویز و شناور شدن سیگنال جلوگیری شود.
- پایههای مانیتورینگ وضعیت:
- ALERT: اعلام خطا در شرایط حفاظتی
- MO: مانیتورینگ وضعیت فازهای موتور
- قابلیتهای حفاظتی داخلی:
- TSD (Thermal Shutdown): محافظت در برابر افزایش دمای بیش از حد
- UVLO (Under Voltage Lockout): قطع عملکرد در صورت کاهش ولتاژ تغذیه
- ISD (Over‑Current Detection): تشخیص جریان بیش از حد یا اتصال کوتاه
- وزن قطعه: حدود ۷٫۷ گرم
ترتیب پایهها و توضیح عملکرد پایههای آیسی TB6600HG
پکیج این آی سی از نوع HZIP25‑P‑1.00F می باشد که دارای 25 پایه به شکل زیر است.
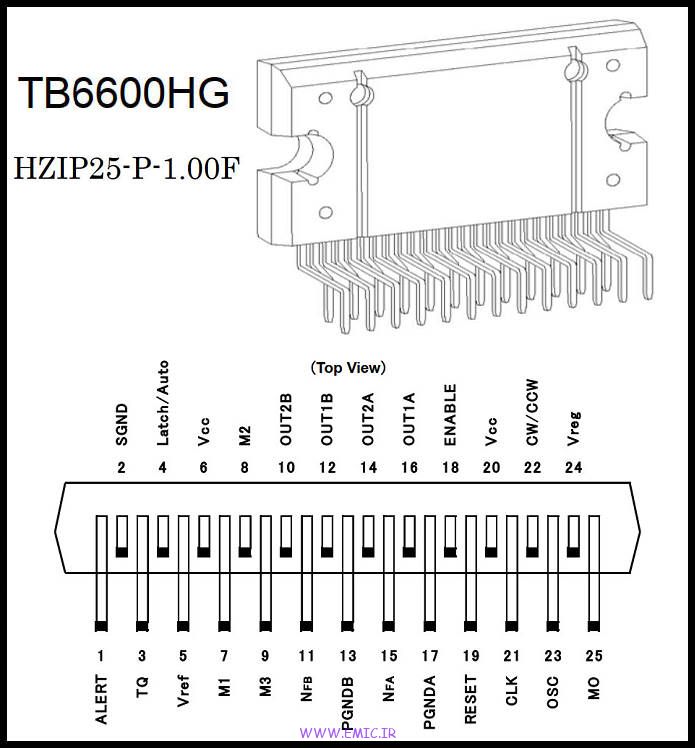
| Pin | I/O | Symbol | توضیح عملکرد | نکات |
|---|---|---|---|---|
| 1 | Output | ALERT | خروجی اعلام خطا برای مدارهای حفاظتی TSD و ISD | نیاز به مقاومت Pull‑up خارجی |
| 2 | — | SGND | زمین بخش سیگنال (Signal Ground) | — |
| 3 | Input | TQ | ورودی تنظیم گشتاور موتور (تنظیم جریان خروجی) | — |
| 4 | Input | Latch/Auto | انتخاب نحوه بازگشت درایور پس از فعال شدن حفاظت حرارتی (TSD) | L: حالت Latch یا قفل / H: بازگشت خودکار |
| 5 | Input | Vref | ورودی ولتاژ مرجع برای تعیین سطح ۱۰۰٪ جریان خروجی | — |
| 6 | Input | Vcc | تغذیه مدار داخلی آیسی | — |
| 7 | Input | M1 | ورودی تنظیم حالت تحریک استپر موتور (Excitation Mode) | — |
| 8 | Input | M2 | ورودی تنظیم حالت تحریک استپر موتور (Excitation Mode) | — |
| 9 | Input | M3 | ورودی تنظیم حالت تحریک استپر موتور (Excitation Mode) | — |
| 10 | Output | OUT2B | خروجی شماره ۲ از کانال B برای اتصال به سیمپیچ موتور | — |
| 11 | — | NFB | پایه تشخیص جریان خروجی کانال B | — |
| 12 | Output | OUT1B | خروجی شماره ۱ از کانال B برای اتصال به سیمپیچ موتور | — |
| 13 | — | PGNDB | زمین بخش قدرت (Power Ground) | — |
| 14 | Output | OUT2A | خروجی شماره ۲ از کانال A برای اتصال به سیمپیچ موتور | — |
| 15 | — | NFA | پایه تشخیص جریان خروجی کانال A | — |
| 16 | Output | OUT1A | خروجی شماره ۱ از کانال A برای اتصال به سیمپیچ موتور | — |
| 17 | — | PGNDA | زمین بخش قدرت (Power Ground) | — |
| 18 | Input | ENABLE | پایه فعالسازی درایور | H: فعال / L: تمام خروجیها خاموش |
| 19 | Input | RESET | ورودی ریست برای بازگرداندن آیسی به حالت اولیه | L: حالت اولیه |
| 20 | Input | Vcc | تغذیه مدار داخلی آیسی | — |
| 21 | Input | CLK | ورودی پالس CLK برای پیشروی مراحل استپر موتور | — |
| 22 | Input | CW/CCW | ورودی تعیین جهت چرخش موتور | L: ساعتگرد (CW) / H: پادساعتگرد (CCW) |
| 23 | — | OSC | اتصال مقاومت برای تنظیم نوسانساز داخلی | — |
| 24 | Output | Vreg | خروجی رگولاتور داخلی؛ برای پایداری باید خازن متصل شود | اتصال خازن به SGND |
| 25 | Output | MO | خروجی مانیتور زاویه الکتریکی موتور | نیاز به مقاومت Pull‑up خارجی |
توضیحات تکمیلی عملکرد پایهها:
پایه 1 — ALERT
- این پایه یک خروجی هشدار است.
- اگر در آیسی مشکلی مثل داغ شدن بیش از حد (Thermal Shutdown) یا جریان غیرعادی اتفاق بیفتد، این پایه فعال میشود تا مدار خارجی یا میکروکنترلر متوجه خطا شود.
- نکته: این پایه باید با یک مقاومت Pull‑up به ولتاژ وصل شود تا بتوان سیگنال آن را خواند.
پایه 2 — SGND
- این پایه زمین بخش سیگنال است.
- تمام سیگنالهای کنترلی مثل CLK و ENABLE نسبت به این زمین اندازهگیری میشوند.
- نکته: زمین سیگنال باید از زمین قدرت تا حد ممکن مسیر تمیزتری روی PCB داشته باشد تا نویز وارد مدار کنترل نشود.
پایه 3 — TQ
- این پایه برای تنظیم گشتاور موتور استفاده میشود.
- در واقع این پایه تعیین میکند که درایور چه مقدار جریان به سیمپیچهای استپر موتور بدهد.
- هرچه جریان بیشتر باشد, گشتاور موتور بیشتر میشود اما گرمای تولیدی هم بیشتر میشود.
پایه 4 — Latch / Auto
- این پایه تعیین میکند اگر آیسی به دلیل گرمای زیاد خاموش شد چه اتفاقی بیفتد.
- Low → حالت Latch (یعنی آیسی خاموش میماند تا زمانی که ریست شود)
- High → حالت Auto (یعنی وقتی آیسی خنک شد، خودش دوباره شروع به کار میکند)
پایه 5 — Vref
- این پایه ولتاژ مرجع تنظیم جریان موتور است.
- درایور جریان سیمپیچ موتور را بر اساس این ولتاژ تنظیم میکند.
- به عبارت دیگر Vref تعیین میکند حداکثر جریان موتور چقدر باشد.
- معمولاً این ولتاژ با یک پتانسیومتر یا مدار تنظیم ولتاژ تنظیم میشود.
پایه 6 — Vcc
- این پایه تغذیه مدار داخلی کنترل آیسی است.
- نکته: این تغذیه مربوط به مدار منطقی و کنترل است، نه توان اصلی موتور
پایه های 7 و 8 و 9 — M1 , M2 , M3
- این سه پایه با هم نوع حرکت استپر موتور را مشخص میکنند.
- با ترکیب صفر و یک این پایهها میتوان حالتهای مختلف را انتخاب کرد مثل Half Step , Full Step و Microstep (1/4 ،1/8 ،1/16)
- هرچه Microstep ریزتر باشد, حرکت موتور نرمتر و دقیقتر میشود.
پایه های 10 و 12 — OUT1B , OUT2B
این دو پایه خروجیهایی هستند که به یک سیمپیچ موتور (فاز B) وصل میشوند.
در واقع این دو پایه با هم یک پل H تشکیل میدهند تا بتوانند جریان را در دو جهت از سیمپیچ عبور دهند, میدان مغناطیسی موتور را تغییر دهند.
پایه 11 — NFB
- این پایه برای اندازهگیری جریان فاز B استفاده میشود.
- معمولاً یک مقاومت سنس جریان به این پایه وصل میشود تا آیسی بتواند مقدار جریان واقعی موتور را اندازه بگیرد.
پایه 13 — PGNDB
- این پایه زمین بخش قدرت برای کانال B است.
- جریان بالای موتور از این مسیر عبور میکند.
پایه 14 و 16 — OUT1A , OUT2A
- این دو پایه خروجیهایی هستند که به سیمپیچ دوم موتور (فاز A) وصل میشوند.
- مثل فاز B، این دو هم یک H-Bridge تشکیل میدهند.
پایه 15 — NFA
- این پایه مشابه NFB است ولی برای فاز A استفاده میشود.
- یعنی جریان سیمپیچ A از طریق این پایه اندازهگیری میشود.
پایه 17 — PGNDA
- زمین بخش قدرت برای کانال A
پایه 18 — ENABLE
- این پایه برای فعال یا غیرفعال کردن درایور استفاده میشود.
- High → درایور فعال میشود و موتور کار میکند
- Low → تمام خروجیها خاموش میشوند
پایه 19 — RESET
- این پایه آیسی را به حالت اولیه برمیگرداند.
- وقتی این پایه Low شود, موقعیت داخلی درایور ریست میشود, توالی تحریک موتور از اول شروع میشود.
پایه 20 — Vcc
- دومین پایه تغذیه برای مدار داخلی آیسی است.
- وجود دو پایه Vcc باعث میشود توزیع جریان بهتر و نویز کمتر شود.
پایه 21 — CLK
- این پایه مهمترین پایه کنترلی است, با هر پالس روی این پایه موتور یک گام جلو میرود.
- مثلاً اگر 100 پالس بدهیم → موتور 100 گام حرکت میکند.
- در حالت Microstep هر پالس یک ریزگام ایجاد میکند.
پایه 22 — CW / CCW
- این پایه جهت چرخش موتور را مشخص میکند.
- Low → چرخش ساعتگرد
- High → چرخش پادساعتگرد
پایه 23 — OSC
- به این پایه یک مقاومت وصل میشود تا فرکانس نوسانساز داخلی تنظیم شود.
- این نوسانساز برای PWM chopper استفاده میشود که جریان موتور را کنترل میکند.
پایه 24 — Vreg
- این پایه خروجی رگولاتور داخلی آیسی است.
- یک خازن باید بین این پایه و SGND وصل شود تا ولتاژ داخلی پایدار شود و نویز کمتر شود.
پایه 25 — MO
- خروجی مانیتور که مرحله فعلی توالی تحریک استپر موتور داخل درایور را نشان میدهد و با پیشروی مراحل موتور تغییر وضعیت میدهد.
- با مشاهده سیگنال این پایه میتوان فهمید موتور در چه مرحلهای از تحریک قرار دارد.
- این پایه خروجی از نوع Open‑Drain بوده و برای استفاده نیاز به مقاومت Pull‑up دارد
بلوک دیاگرام داخلی آیسی TB6600HG
آیسی TB6600HG سیگنالهای کنترلی مثل پالس CLK و جهت چرخش CW/CCW را از میکروکنترلر دریافت میکند. سپس با توجه به تنظیمات پایههای M1 ،M2 ،M3 مشخص میکند موتور در چه حالتی حرکت کند (فولاستپ، نیماستپ یا میکرواستپ).
بعد از تعیین حالت حرکت، آیسی مقدار جریان مناسب برای هر سیمپیچ موتور را محاسبه میکند. برای اینکه جریان موتور دقیق و کنترلشده باشد، آیسی جریان واقعی را اندازهگیری کرده و با روش PWM Chopper آن را تنظیم میکند.
در نهایت دو مدار پل H (H‑Bridge) داخل آیسی جریان را در سیمپیچهای موتور هدایت میکنند تا موتور قدمبهقدم و با جهت درست حرکت کند. اگر هم مشکلی مثل افزایش دما، اتصال کوتاه یا افت ولتاژ رخ دهد، مدارهای حفاظتی فعال شده و از آسیب دیدن آیسی جلوگیری میکنند.
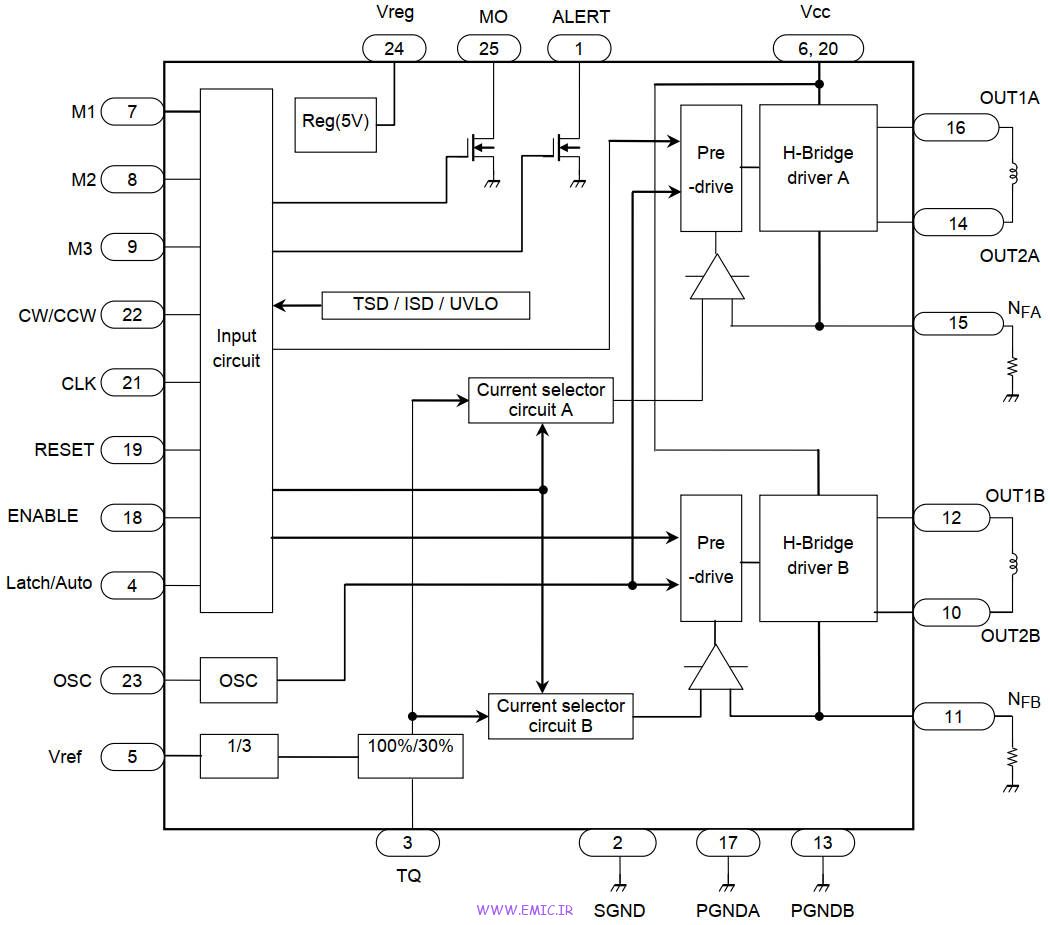
بهتر است بلوک های داخلی آیسی را برای درک بهتر، به چهار بخش اصلی تقسیم کرد.
1. بخش دریافت فرمانها
Input Circuit : این بخش تمام سیگنالهای کنترلی آیسی را دریافت میکند مانند پالس حرکت موتور (CLK) ، جهت چرخش (CW/CCW) ، انتخاب نوع گام (M1 ،M2 ،M3) ، فعال یا غیرفعال کردن درایور سپس این سیگنالها را به دستورات داخلی تبدیل میکند تا آیسی بداند موتور چگونه باید حرکت کند.
Reg (5V) : یک رگولاتور داخلی است که ولتاژ ۵ ولت پایدار برای مدارهای منطقی داخل آیسی فراهم میکند.
2. بخش کنترل جریان و تولید میکرواستپ
OSC (Oscillator) : یک نوسانساز داخلی است که با کمک یک مقاومت خارجی فرکانسی تولید میکند. این فرکانس برای کنترل جریان موتور با روش PWM (چاپر) استفاده میشود.
1/3 (Voltage Divider) : این بخش ولتاژ مرجع Vref را به سطح مناسب تبدیل میکند تا مبنای تنظیم جریان موتور قرار بگیرد.
100% / 30% (Torque Control) : پایه TQ درصد جریان (و گشتاور) موتور را نسبت به مقدار حداکثری که با Vref تنظیم شده تعیین میکند. یعنی مشخص میکند موتور با چه درصدی از جریان نامی (بین 30 تا 100 درصد) کار کند. کاهش جریان موتور در حالتهایی مثل توقف یا بار کم باعث کاهش مصرف توان و گرما می شود.
Current Selector Circuit A : این بخش مشخص میکند در سیمپیچ فاز A چه مقدار جریان باید جریان یابد. مقدار جریان نامی از Vref بهدست میآید و شکل تغییر آن بر اساس الگوی میکرواستپ تعیین میشود.
Current Selector Circuit B : این بخش همان کار را برای سیمپیچ فاز B موتور انجام میدهد.
این دو بخش با هم باعث میشوند جریان سیمپیچها به شکل سینوسی تغییر کند و موتور حرکت نرمتری داشته باشد.
3. بخش درایور قدرت
Pre‑Drive : یک مدار واسطه است که سیگنالهای کنترلی را تقویت میکند تا بتوانند ترانزیستورهای قدرت را کنترل کنند.
H‑Bridge Driver A : مدار پل H قدرت برای سیمپیچ فاز A موتور است که میتواند جهت جریان را در سیمپیچ تغییر دهد و باعث حرکت موتور شود.
H‑Bridge Driver B : پل H مربوط به سیمپیچ فاز B موتور است که مانند فاز A جریان این سیمپیچ را کنترل میکند.
Current Detection (NFA / NFB) : در این قسمت جریان واقعی عبوری از سیمپیچهای موتور اندازهگیری میشود. سپس این مقدار با جریان تنظیمشده مقایسه میشود تا در صورت نیاز توسط مدار PWM اصلاح شود.
4. بخش حفاظت و مانیتورینگ
TSD / ISD / UVLO : این بخش حفاظتی آیسی است که از آن در برابر شرایط خطرناک محافظت میکند. TSD حفاظت در برابر دمای زیاد ، ISD حفاظت در برابر اضافهجریان یا اتصال کوتاه ، UVLO حفاظت در برابر کاهش بیش از حد ولتاژ
MO (Monitor Output) : این خروجی نشان میدهد درایور در کدام مرحله از تحریک موتور قرار دارد و برای بررسی عملکرد سیستم استفاده میشود.
ALERT : اگر خطایی مانند اضافهجریان یا دمای زیاد رخ دهد، این پایه فعال میشود تا مدار کنترل متوجه مشکل شود.
مدار نمونه آیسی TB6600HG
شکل زیر مدار نمونه (Typical Application Circuit) آیسی TB6600HG را نشان میدهد. یعنی نحوه اتصال آیسی به میکروکنترلر، منبع تغذیه و استپر موتور در یک کاربرد واقعی مشخص شده است.
در این مدار، میکروکنترلر پالسها و فرمانهای کنترلی (گام، جهت و حالت میکرواستپ) را به آیسی میدهد. آیسی با استفاده از مدار کنترل داخلی و PWM Chopper جریان مناسب هر فاز موتور را تنظیم میکند و از طریق پلهای H آن را به سیمپیچهای موتور اعمال میکند.
همچنین با کمک Vref، مقاومتهای حس جریان (Rs) و پایه TQ مقدار جریان موتور تنظیم و کنترل میشود تا موتور با دقت، گشتاور مناسب و محافظت در برابر خطاها کار کند.
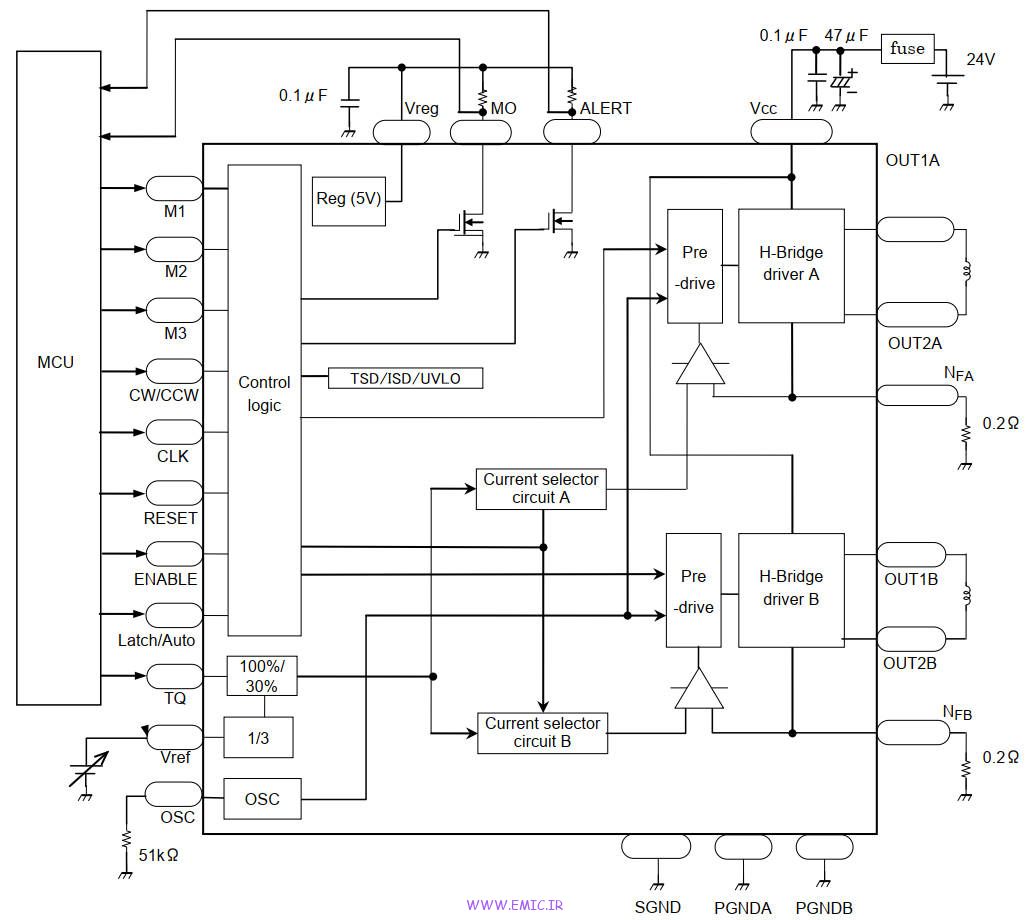
همانطور که در تصویر بالا مشاهده می کنید میکروکنترلر (MCU) به پایه های ورودی ای سی متصل شده است. مقاومت 51K اهم متصل به پایه OSC برای تعیین فرکانس نوسانساز داخلی و در نتیجه فرکانس PWM کنترل جریان می باشد. خازن 47µF و 0.1µF (روی تغذیه) برای کاهش افت ولتاژ هنگام کشیدن جریان زیاد توسط موتور حذف نویزهای فرکانس بالا و پایدار کردن تغذیه آیسی می باشند. فیوز روی ورودی تغذیه نیز برای جلوگیری از سوختن آیسی یا برد در صورت اتصال کوتاه، اشتباه سیمبندی یا خرابی موتور است. مقاومتهای 0.2Ω (Rs) روی NFA و NFB برای اندازهگیری جریان سیمپیچهای موتور برای کنترل دقیق جریان هستند. خازن 0.1µF روی Vreg برای پایدارسازی خروجی رگولاتور داخلی آیسی است.
پایههای MO و ALERT در آیسی TB6600HG دارای ساختار خروجی Open‑Drain هستند. بنابراین آیسی فقط میتواند این پایهها را به زمین (LOW) بکشد و قادر به تولید سطح HIGH نیست. به همین دلیل برای ایجاد سطح منطقی HIGH و جلوگیری از حالت شناور، این پایهها باید توسط مقاومتهای Pull‑up به ولتاژ رگولاتور داخلی آیسی یعنی Vreg (5 ولت) متصل شوند.
نتیجهگیری و جمعبندی نهایی
آیسی TB6600HG یکی از درایورهای قدرتمند و پرکاربرد برای کنترل استپر موتورهای دو فاز بایپولار است که به دلیل قابلیتهایی مانند کنترل جریان با روش PWM Chopper، پشتیبانی از میکرواستپ سینوسی، توانایی راهاندازی موتورهای با جریان بالا و همچنین وجود مدارهای حفاظتی داخلی، در بسیاری از سیستمهای حرکتی دقیق مورد استفاده قرار میگیرد. به همین دلیل این آیسی و ماژولهای مبتنی بر آن در دستگاههایی مانند CNC، پرینترهای سهبعدی، بازوهای رباتیک و تجهیزات اتوماسیون صنعتی کاربرد گستردهای دارند.
نظر یادتون نره…


